로보티즈 매니퓰레이터-L
■ 특징
다목적, 보급형 매니퓰레이터
다이나믹셀 프로 기반의 6 자유도 구성
유지 보수가 용이한 모듈형 설계
거치와 이동이 용이한 경량화 설계
중소형 작업에 적합한 가반하중
넓은 구동 영역
고정밀 반복작업 능력
USB 인터페이스, RS-485 통신
사용자 프로그램이 가능한 전용 SDK 제공
(포워드/인버스 키네마틱스, 프로파일 컨트롤 예제 제공)
■ 기본 구성품
|
구성품 |
수량 | |
|
제품 |
매니퓰레이터-L (조립완성품) |
1개 |
|
보관가방 |
케이스 |
1개 |
|
PC 인터페이스 |
USB2Dynamixel |
1개 |
|
악세서리 |
여분 케이블 세트 (4P, 2P) |
1세트 |
|
스크류 세트 (WB M2.5 외) |
1세트 | |
|
USB 메모리 (SDK, 매뉴얼) |
1개 | |
|
퀵스타트북 |
1권 | |
■ H/W 사양
|
|
Manipulator-L |
|
DOF |
6 |
|
Payload (kg) |
1 |
|
Repeatability (mm) |
±0.1 |
|
Speed (Each joint, deg/sec) |
120 |
|
Weight (kg) |
4.5 |
|
Reach (mm) |
633 |
|
Rated voltage (VDC) |
24 |
|
Communication |
RS-485 (Multi Drop Bus) |
|
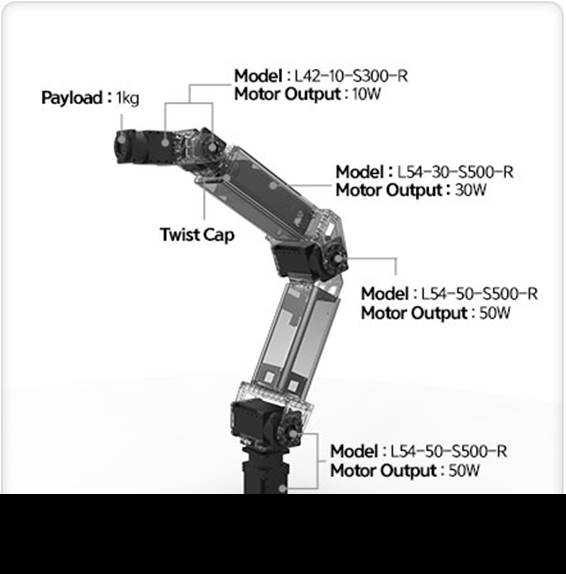
Power (Joint) |
50W : 3EA |
|
30W : 1EA | |
|
10W : 2EA | |
|
Software |
ROBOTIS Manipulator SDK |
|
Controller |
PC (Not Included) |

■ S/W 사양
Arm access 통신 프로토콜 라이브러리 및 예제
Arm 제어 파라미터 설정 및 모니터링 예제
Kinematics 라이브러리 (FK, IK) 및 예제
관절/엔드포인트 프로파일 컨트롤 라이브러리 및 예제
■ 액츄에이터 구성
■ 액츄에이터(다이나믹셀 프로)의 특징
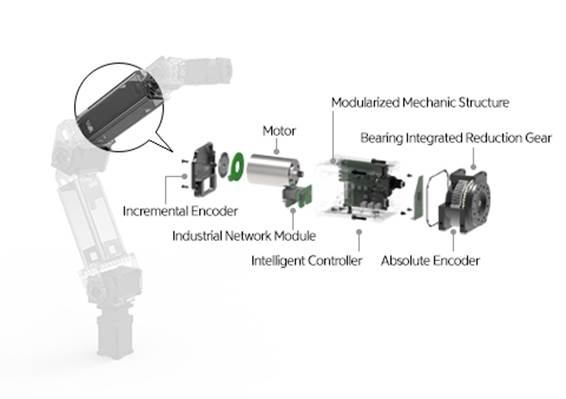
일체형 모듈
DC모터 + 컨트롤러 + 드라이버 + 센서 + 싸이클로이드 감속기
소형, 경량 실현
자체 개발한 소형, 경량의 싸이클로이드 감속기로 모듈 크기 최소화
높은 무게대 출력비 수현 (0.05Nm/g)
동급 대비 높은 내충격성 지수 (400% 이상)
정밀제어 및 낮은 백래쉬
인크리멘털 엔코더와 최종축 절대위치 인식용 비접촉식 마그네틱 엔코더 탑재
3~4arcmin의 낮은 백래쉬 달성
KOLAS(한국교정시험기관인정기구) 교정 시험장비로 측정한 성능 데이터 제공
전류센싱 기반 토크 제어
고속 전류 센싱 알고리즘 및 전류 피드백 제어 기능 구현
속도, 위치 제어 방식과의 복합 제어 기능 제공
손쉬운 개발 환경 제공
C언어 기반 라이브러리 제공
다양한 솔루션의 예제 지원 (C++, LabVIEW, C#, eclipse, JAVA, etc..)
■ 로보티즈 매니퓰레이터의 주요 용도
교육 및 연구
기구학, 동역학 실험 실습
양팔로봇 시스템 설계 및 연구
모바일 로봇 시스템 구축
산업현장 운용
검사장비 구축
소규모 이송 시스템