DYNAMIXEL MX-64AR (벌크팩 6개)
1. 정밀 설계와 특수 가공을 거친 알루미늄 프론트 케이스 적용
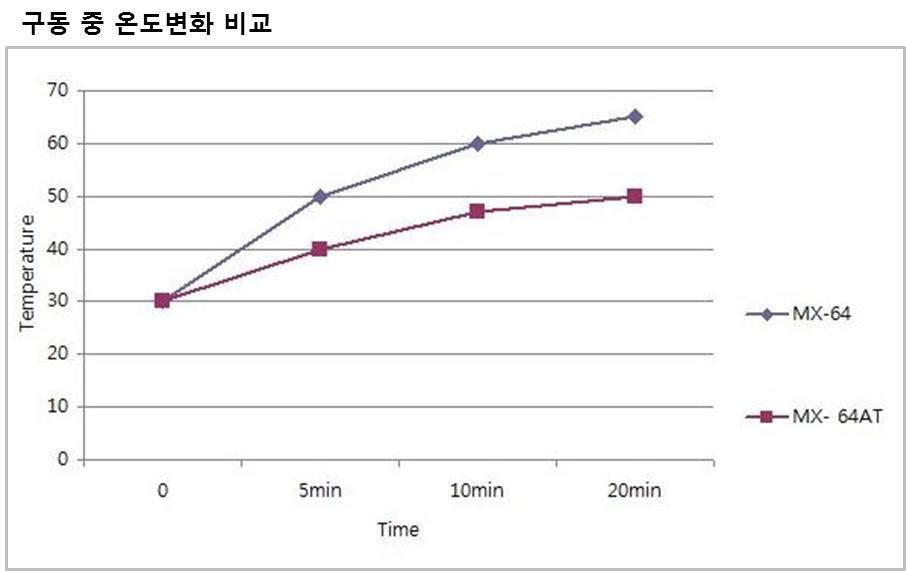
2. 소음 감소, 방열 성능 증대
3. 전면 케이스에 태핑 작업이 되어있어 간편하게 볼트 체결 가능
4. 기존 다이나믹셀 M-시리즈와 동일한 외형 유지 (옵션프레임 호환)
■ 특징
Dynamixel은 감속기, 제어기, 구동기 및 Network 기능 등을 일체형으로 구성하여 하나의 모듈로 만든 로봇 전용 Smart Actuator입니다.
MX-시리즈는 정밀제어와 PID 제어, 360도 위치 제어, 고속 통신 기능이 추가된 신개념의 다이나믹셀입니다.
비접촉식 absolute encoder를 적용하여 내구성, 정밀도, 제어 범위 증가
데드 구간없이 360° 전 영역의 위치제어 가능
360°를 0.088° 단위로 4096단계에 걸쳐 제어 가능
Endless Turn Mode에서 속도 제어 가능
PID 제어를 통해 위치제어 신뢰성 및 정확성 증가
4.5Mbps의 고속 통신을 지원
RS-485 통신 채택
전류 센싱을 통한 토크 제어


■ 기본 구성품
|
구성품 |
수량 | |
|
다이나믹셀 |
MX-64AR |
1개 |
|
혼 |
HN05-N102 (MX전용) |
1개 |
|
워셔 |
Thrust Washer (혼 체결용) |
1개 |
|
케이블 |
3P 케이블 200MM |
1개 |
|
볼트/너트 |
렌치볼트 (WB M2.5*4) |
16개 |
|
렌치볼트 (WB M3*8) |
1개 | |
|
너트 (NUT M2.5) |
18개 | |
■ H/W 사양
| 모델명 |
MX-64AR | ||
|
무게 |
135g | ||
|
크기 |
40.2mm x 61.1mm x 41mm | ||
|
기어비 |
200 : 1 | ||
|
Operation Voltage (V) |
11 |
12 |
14.8 |
|
Stall Torque (N.m) |
5.5 |
6 |
7.3 |
|
Stall Current (A) |
3.9 |
4.1 |
5.2 |
|
No Load Speed (RPM) |
58 |
63 |
78 |
|
| |||
|
Motor |
Maxon Motor | ||
|
최소 제어각 |
약 0.088° x 4,096 | ||
|
동작 범위 |
관절모드 : 360° 바퀴모드 : Endless turn | ||
|
사용 전압 범위 |
10~14.8V (Recommended voltage : 12V) | ||
|
동작 온도 |
-5°C ~ 80°C | ||
|
통신 방식 |
Digital Packet | ||
|
프로토콜 |
RS485 Asynchronous Serial Communication (8bit,1stop, No Parity) | ||
|
Link (physical) |
RS485 Multi Drop Bus (daisy chain type connector) | ||
|
ID |
254 ID (0~253) | ||
|
통신 속도 |
8000bps ~ 4.5Mbps | ||
|
피드백 기능 |
Position, Temperature, Load, Input Voltage, Current, etc. | ||
|
재질 |
케이스 : Engineering Plastic 기어 : Full Metal | ||
|
위치센서 |
Contactless absolute encoder | ||
■ 출고시 기본 설정
ID : 1
통신속도 : 57600bps
(구매 후 사용 환경에 따라 ID와 통신속도 등을 설정 변경하여 사용하시기 바랍니다.)
■ 장착 가능한 제품
제어기 : CM-2+, CM-700, OpenCM9.04(+RS485 확장보드)
인터페이스 : USB2Dynamixel (RS-485)
주의 : RX-64용 혼(HN05-N101 Set / T101 Set)은 장착할 수 없습니다.
■ 제어 환경
로봇 전용 소프트웨어 로보플러스 : 다운로드
C/C++, C#, Labview, MATLAB, Visual Basic 외 : 라이브러리 다운로드